联系人:邸经理
手 机:18230183999
邮 箱:sales@kingcats.cn
地 址:河北衡水安平县城东工业区
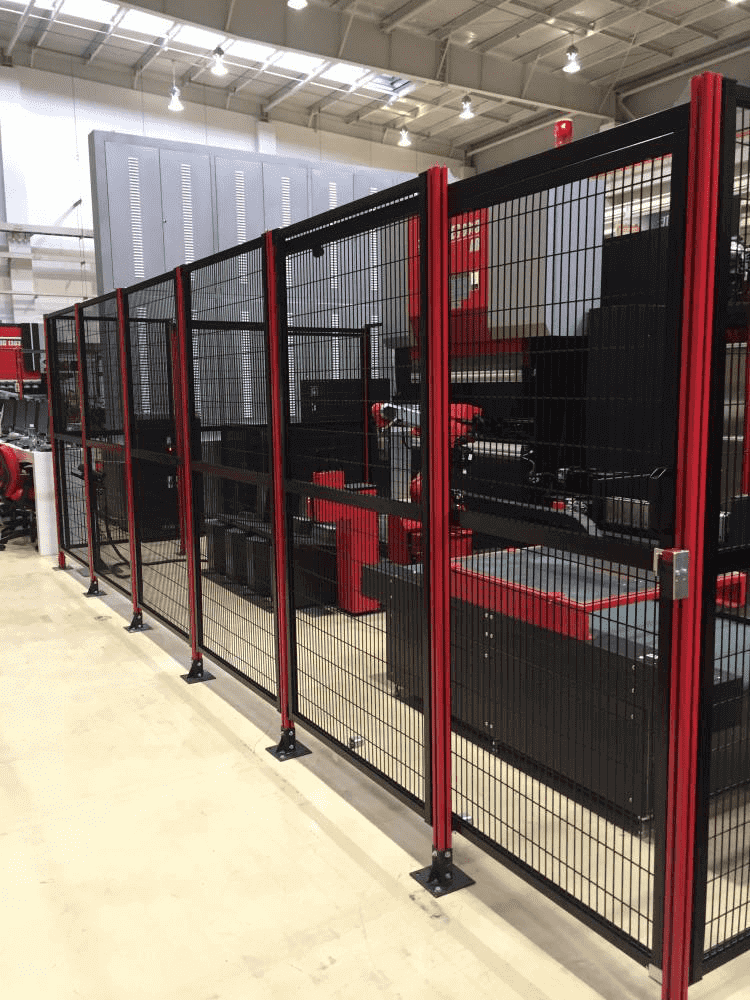
随着智能机器人技术的飞速发展,机器人围网系统在各个领域中扮演着越来越重要的角色。这些系统不仅能提供高效的工作效率,还能提高生产力和人力资源的利用率。然而,机器人围网系统的安全性能和可操作性成为了当前研究的焦点。
首先,我们需要明确安全性在机器人围网系统中的重要性。安全性指的是系统在面对各种潜在威胁和攻击时的稳定性。机器人围网系统面临着来自网络攻击、恶意软件、数据泄漏等多种安全威胁。因此,为了保障机器人围网系统正常运行以及防止机密信息外泄,我们需要评价和改进系统的安全性能。
其次,可操作性是机器人围网系统能否方便操作和灵活应用的重要指标。可操作性是指系统的易用性、学习曲线、稳定性和可扩展性等方面。一个易于操作的系统能够提高工作效率,降低运营成本,并减少操作人员的培训负担。而缺乏可操作性的系统则会导致不必要的复杂性和低效率。
在评价机器人围网系统的安全性能和可操作性时,我们需要建立一个综合的评价方法,以全面分析系统的优劣。以下是一个可能的评价方法:
1. 收集数据:首先,我们需要收集关于系统安全性能和可操作性的数据。这包括系统的网络结构、安全漏洞和潜在威胁,以及系统的操作界面、学习曲线和可扩展性等。
2. 设计评价指标:基于收集到的数据,我们可以设计一些评价指标来量化系统的安全性能和可操作性。例如,可以使用安全等级评估来衡量系统的安全性,使用用户反馈和系统错误率来评价系统的可操作性。
3. 权重分配:根据评价指标的重要性,给予每个指标适当的权重。安全性指标可能需要更高的权重,而可操作性指标则可能需要较低的权重。
4. 数据分析和得出结论:通过对收集到的数据进行分析,我们可以得出关于系统安全性能和可操作性的结论。这些结论可以用来指导系统改进和优化。
除了以上方法之外,还可以结合机器学习和人工智能的技术,通过数据挖掘和模型训练来评价系统的安全性能和可操作性。通过这些技术的应用,我们可以更加准确地评估系统的优劣,并提供相应的改进方向。
总之,机器人围网系统的安全性和可操作性是影响系统质量和效率的重要因素。通过建立综合的评价方法,我们可以客观地评估系统的优劣,并为系统改进提供指导。这将有助于机器人围网系统在各行各业的广泛应用,提高生产力和工作效率。

服务热线

