联系人:邸经理
手 机:18230183999
邮 箱:sales@kingcats.cn
地 址:河北衡水安平县城东工业区
随着机器人技术的飞速发展,机器人在工业、医疗、服务等领域的应用越来越广泛。然而,随之而来的安全隐患也使人们开始关注机器人的安全问题。特别是在与人类共同工作的环境下,如何保障人机安全成为一个亟待解决的问题。本文将分享机器人安全隔离的技术要点与实践经验,希望能为相关领域的从业者提供一些有益的参考。
首先,在机器人安全隔离的技术要点方面,我们要关注以下几个关键因素。首先是机器人的感知技术。机器人应当能够实时感知周围环境,并能够准确地探测到人类的存在和动作。这需要机器人配备高精度的传感器和**的视觉系统,以确保能够及时发现潜在的危险情况。其次是机器人的控制技术。机器人的控制系统应具备高度灵活性和迅速响应的能力,能够及时调整机器人的运动轨迹,避免与人类发生碰撞。**是机器人的自主性。机器人应具备一定的智能能力,能够判断周围环境的安全程度,并作出相应的决策,保障人机之间的安全。
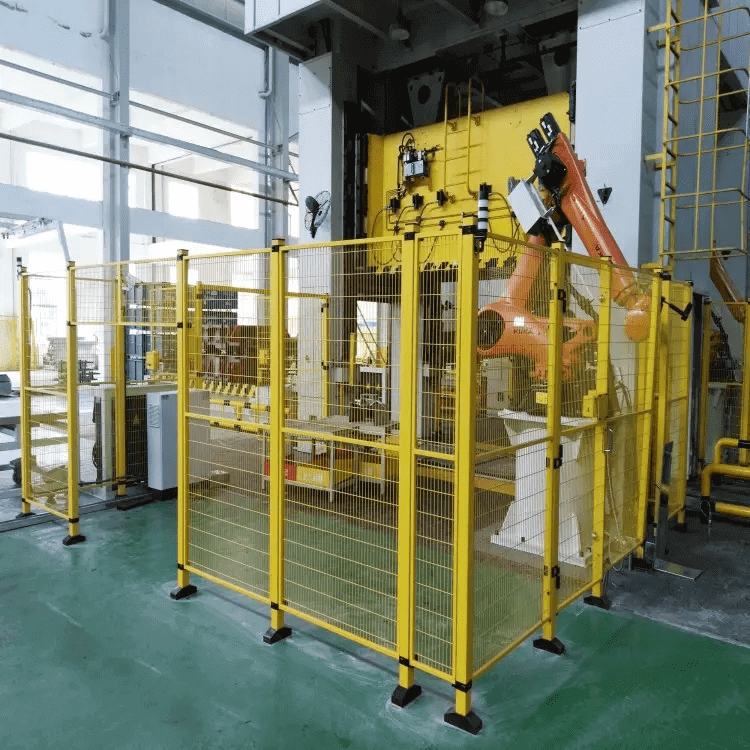
其次,针对机器人安全隔离的实践经验,我们总结了以下几点。首先是设计合理的工作区域。机器人与人类共同工作的环境应当设置明确的边界,以确保机器人的活动范围与人类的活动范围有所区隔。在这个边界范围内,应设置专门的工作区域,并对其进行标识和划定。此外,还可以通过物理屏障或者视觉检测系统等方式,进一步限制机器人的活动范围,防止其越界。其次是配备适当的安全装置。在与人类共同工作的环境下,机器人应当配备相应的安全装置,如急停按钮和防碰撞传感器等,以便及时应对突发情况,保障人机之间的安全。此外,还应根据具体的任务需求和机器人的特点,选择适当的安全装置。**是定期进行安全检测与维护。机器人在工作一段时间后,容易出现一些故障或者安全漏洞,因此应定期对机器人进行安全检测和维护,确保其安全可靠地运行。
综上所述,机器人安全隔离的技术要点与实践经验包括机器人的感知技术、控制技术和自主性等方面的要点,以及设计合理的工作区域、配备适当的安全装置和定期进行安全检测与维护等实践经验。通过遵循这些要点和实践经验,可以有效地保障人机安全,避免人机接触时发生意外事故,进一步推动机器人技术的发展和应用。机器人的未来将更加智能、高效、安全,为人类创造更多的价值和便利。

服务热线

